Generalist Robot Policy 살펴보기
범용 지능인 LLM의 성능이 크게 발전하면서 이 능력을 물리 세계로 옮기고자 하는 시도가 활발히 이루어지고 있다. 본 글에서는 물리 세계를 이해하고 상호작용할 수 있는 Physical AI의 동향을 정리하고 각 논문에서 소개한 주요 아이디어를 알아보려 한다. 논문 선정은 앵지유니버스님의 영상을 참고했다.
Generalist VLA의 등장
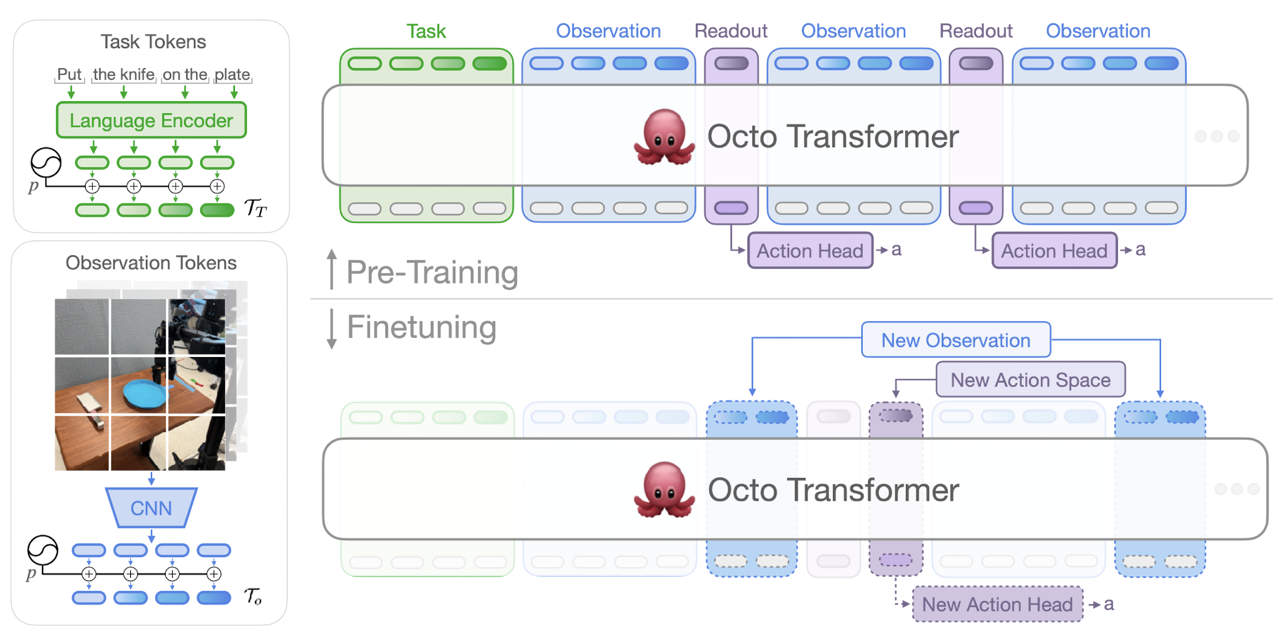
기존의 로봇은 센서, 동작 범위 등 요소가 바뀌면 처음부터 새로 학습해야하는 문제가 있었다. 이 때문에 다양한 downstream task에 적용할 수 있는 범용 모델이 필요했고 Octo가 등장했다. Octo는 transformer 기반의 정책을 사용한다. 입력 tokenizer는 language instruction, goal, observation sequence를 토큰으로 변환한다. 이때 자연어는 t5-base, 이미지는 shallow convolutional stack을 사용한다. 생성된 토큰은 positional encoding을 적용한 상태로 transformer backbone을 거쳐 임베딩으로 변환되고, 최종적으로 readout head를 통해 출력을 생성한다. Readout의 출력은 BERT의 [CLS] 토큰과 같이 정보를 압축해 놓은 벡터의 역할을 한다. 따라서 최종적으로 가벼운 action head를 거치면서 action chunk를 예측한다. Action head는 conditional diffusion decoding을 통해 출력을 생성하기 때문에 standard DDPM objective로 학습한다.
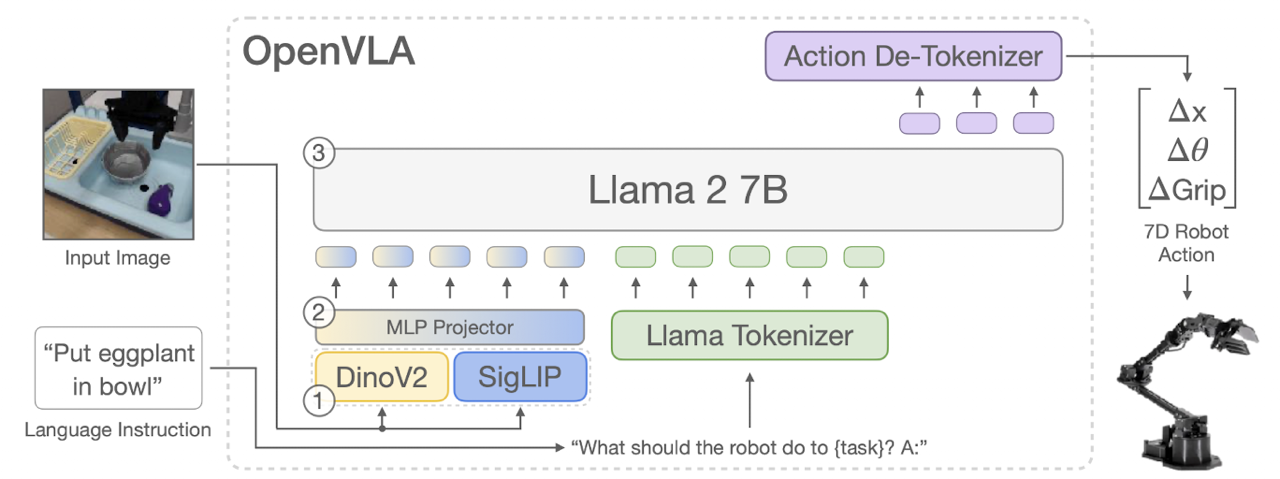
OpenVLA는 Octo와 마찬가지로 범용 오픈소스 VLA을 목표로 등장했으며, 게다가 성능이 더 뛰어나고 fine-tuning이 쉽게 설계되었다. 저자는 행동 예측 문제를 ‘vision-language’ task로 정의했다. 이를 위해 연속된 행동을 bin 단위로 나누어 이산화된 토큰으로 정의했다. 그리고 LLM backbone의 출력 토큰 중 자주 사용하지 않는 토큰을 256개의 행동 토큰으로 덮어쓰는 방식으로 행동 공간이 LLM의 토큰 공간 안에 통합되도록 설계했다. 따라서 학습도 standard next-token objective와 동일하게 cross-entropy loss를 계산한다. 이러한 설계 덕분에 LoRA나 4-bit quantization과 같이 LLM에서 사용하던 테크닉을 적용할 수 있다는 장점을 가진다. 참고로 이미지는 visual encoder + projector를 통해 LLM의 벡터 공간으로 매핑되며, SigLIP-DINOv2가 spatial reasoning 성능을 향상시켜, 널리 사용되는 CLIP + SigLIP 조합보다 높은 성능을 보였다고 한다.
생성 모델로 연속 행동 예측
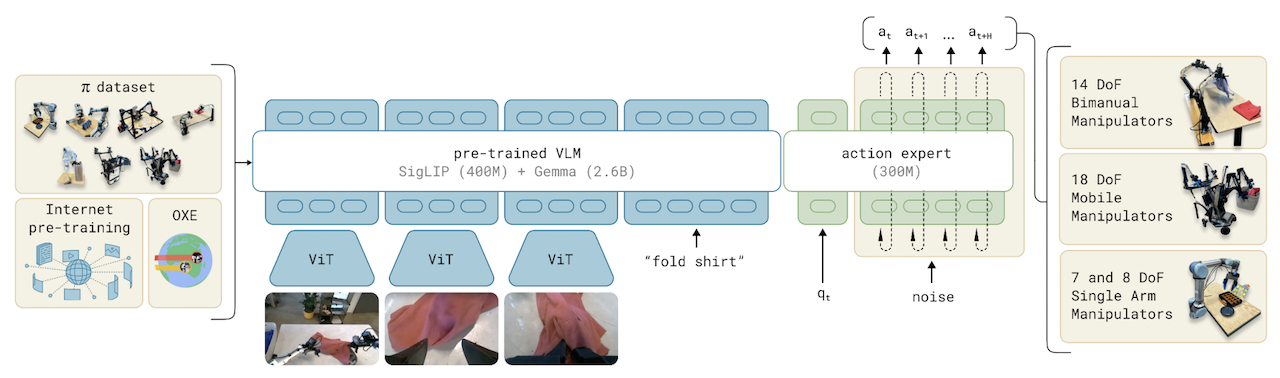
$\pi_0$는 대량의 데이터를 올바른 구조에, 올바른 방법으로 학습하는 것이 중요하다고 주장한다. 먼저 모델 구조의 관점에서는 Conditional Flow Matching을 이용한 행동 생성을 제안하며, action chunking을 학습하기 위해 flow matching loss를 사용한다. 또한 학습 전략에 대해서도 설명한다. 초반 pre-train 단계에서는 넓은 범위의 일반화 지식을 학습하도록 하고, post-training 단계에서는 정교하고 복잡한 작업을 학습하도록 한다. 이 방식을 통해 일부 문제에서 성능을 최대 2배 높였다.
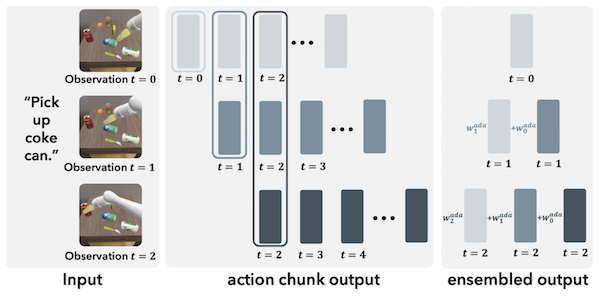
CogACT는 diffusion transformer를 이용해 action을 생성한다. 특별한 점은 자연스러운 연속 행동 예측을 위해 adaptive ensemble strategy를 도입했다.
\[\hat{a}_t = \sum_{k=0}^{K} w_k^{\text{ada}} \cdot a_t | o_{t-k}\] \[w_k^{\text{ada}} = \exp(\alpha \cdot < a_t | o_t, a_t | o_{t-k} >)\]$a_t | o_{t}$는 관찰된 상태 $o_{t}$에 대해 예측한 행동 $a_t$를 의미한다. $< \cdot , \cdot >$은 두 값 사이의 유사도를 뜻한다. 즉, 현재 $a_t$는 과거 $a_{1, … t-1}$의 영향을 받으며, 과거 행동 중 유사도가 낮은 행동의 가중치를 지수적으로 감소시켜 과거 시퀀스의 정보가 현재 $o_t$에 자연스럽게 반영되도록 한다.
Embodied Reasoning
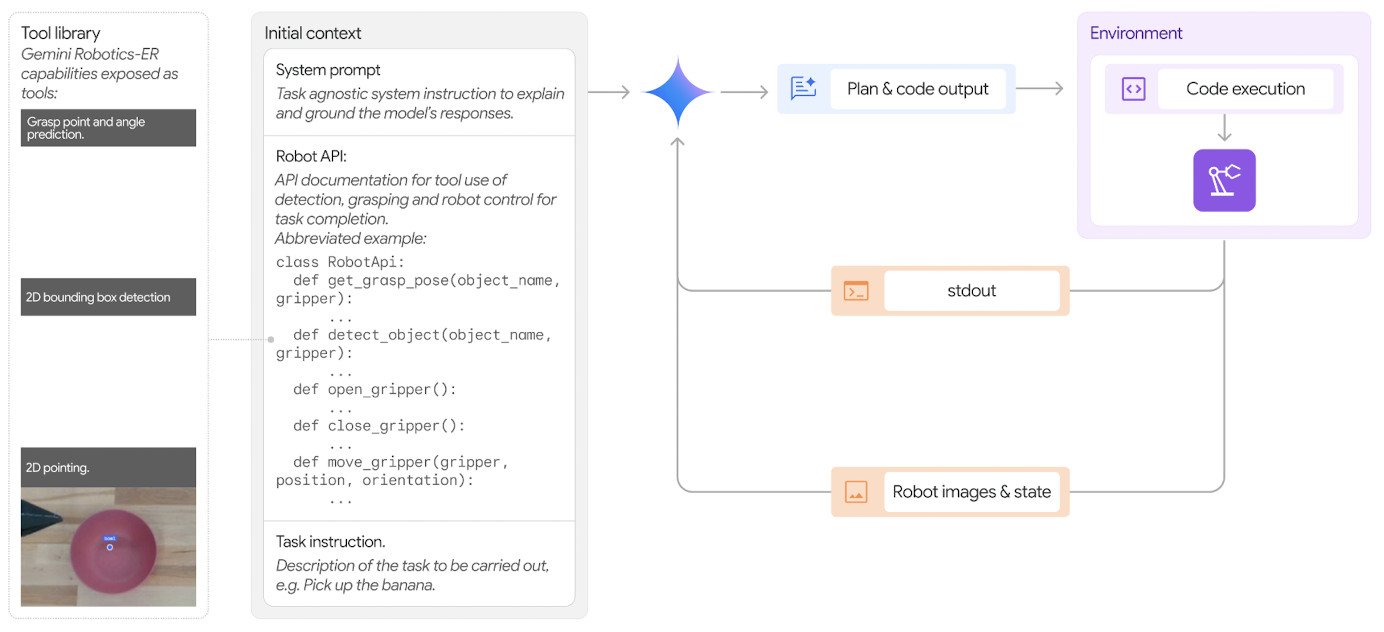
Google은 gemini를 이용해 gemini-robotics를 설계했고, gemini의 풍부한 지식 덕분에 zero-shot만으로도 뛰어난 embodied reasoning 성능을 보였다. Embodied reasoning이란 2D/3D object detection, 2D pointing, multi-view correspondence 등 과제를 수행하는 능력을 말한다. 여기에 CoT나 few-shot을 적용하면 성능이 향상되었다. CoT는 단순히 “Reason step by step about the answer, and show your work, for each step. Only after that, proceed to the final answer”를 지시문 끝에 붙이는 걸 말한다. Few-shot은 시연 예시를 inference time의 프롬프트에 추가하는 in-context example을 말하며, 동작뿐만 아니라 동작에 대한 reasoning을 자연어로 서술해 함께 포함시킨다. 두 방식 모두 성능 향상을 보였으며, 특히 few-shot은 zero-shot일 때 성공하지 못한 과제를 성공해 내기도 했다. 더 나아가 inference latency를 줄이기 위해 모델을 두 모듈로 분리했다. Gemini를 기반으로한 VLA backbone은 cloud에서 작동시켜 지연 시간을 160ms 미만으로 줄였으며, Action decoder는 로봇에 위치한다. 이 구조를 통해 end-to-end 작업에 약 250ms의 지연이 발생해 실시간 추론이 가능한 수준의 성능을 달성했다.
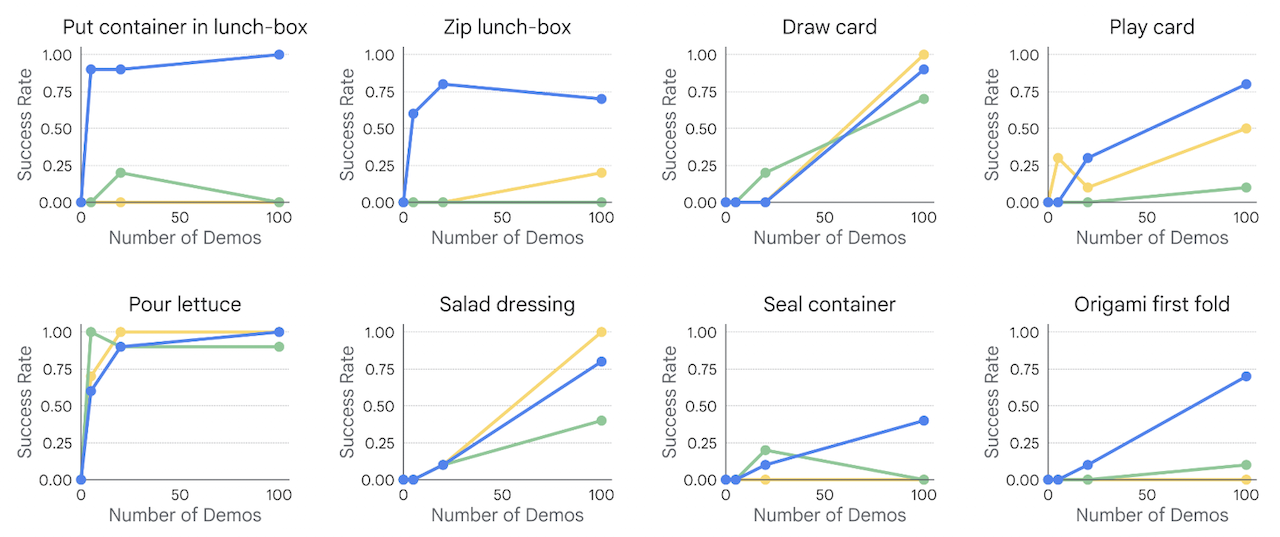
Gemini-robotics의 가장 큰 장점은 범용 지식을 학습하고 있다는 점이다. 이 덕분에 fine-tuning을 거쳤을 때 평균 과제 성공률 79%를 달성했다. 일부 과제에서 baseline 모델들은 0점을 달성했으나, gemini-robotics는 과제에 따라 적게는 45%부터 높게는 100%의 성공률을 보이며 다른 모델 대비 눈에 띄게 높은 성공률을 보였다. 강력한 일반화 성능 덕분에 다른 embodiment로의 전이도 가능했다. 예를 들어, ALOHA 2에서 수집한 데이터로 학습한 모델을 bi-arm Franka에 전이(fine-tune)했을 때 평균 과제 성공률 63%를 달성했다.
Reference
- Team, Octo Model, et al. “Octo: An open-source generalist robot policy.” arXiv preprint arXiv:2405.12213 (2024).
- Kim, Moo Jin, et al. “Openvla: An open-source vision-language-action model.” arXiv preprint arXiv:2406.09246 (2024).
- Black, Kevin, et al. “π0: A vision-language-action flow model for general robot control, 2024a.” arXiv preprint arXiv:2410.24164 (2024).
- Li, Qixiu, et al. “Cogact: A foundational vision-language-action model for synergizing cognition and action in robotic manipulation.” arXiv preprint arXiv:2411.19650 (2024).
- Team, Gemini Robotics, et al. “Gemini robotics: Bringing ai into the physical world.” arXiv preprint arXiv:2503.20020 (2025).